Se modifico el programa para optimizar la memoria, mejorar el movimiento, filtrar temblor de mano y mejorar la precisión al tomar objetos.
Por accidente corregí unos acentos, si te marca errores solo con borrarlos basta.
Código 5
#include <Servo.h>
#define Juallekcreator
Servo servo1;//base
Servo servo2;//codo
Servo servo3;//mano
Servo servo4;;//muñeca
Servo servo5;//pinza
//arreglos, solo pueden memorizar 19 posiciones con esta configuración
int memoria1[20];
int memoria2[20];
int memoria3[20];
int memoria4[20];
int memoria5[20];
//arreglos para cálculos
double paso[5],incremento[5],diferencia[5],registro[5],direccion[5];
//contadores
int pasoN=0,i=0,pasomax=0,seccion=1,limite=0;
//tiempo
long tiempoc=0;
long tiempob=0;
unsigned long tiempotranscurrido=millis();
unsigned long tiempomicros=micros();
int time=1000;
//constantes
#define retardo 4000
//booleanos
boolean automata=false, primer_memoria=true, primer_paso=true, pinzaabierta=true, primer_seccion=true, ultima_memoria=true;
void setup()
{
pinMode(5,INPUT);//swith de pinza
pinMode(6, INPUT);//memoria
pinMode(7, INPUT);//sistema en pausa
pinMode(13, OUTPUT);
servo1.attach(8);
servo2.attach(9);
servo3.attach(10);
servo4.attach(11);
servo5.attach(12);
Serial.begin(115200);
}
void loop()
{
tiempotranscurrido=millis();
tiempomicros=micros();
boton();
if(!automata)
{
mover();
}
else if(automata)
{
if(primer_paso==true)
{
if(ultima_memoria)ultimo_registro();
pasoN=0;
primer_paso=false;
}
else if(pasoN>pasomax)
{
pasoN=0;
}
if(primer_sección)matriz_de_traslación();
if(tiempomicros-tiempob>time)
{
tiempob=tiempomicros;
ejecutar_automata();
}
}
}
void boton()
{
if((digitalRead(6))==LOW)
{
delay(20);
if((digitalRead(6))==HIGH)
{
if(i==0)
{
i=1;
tiempoc=tiempotranscurrido;
}
else if((i==1)&&((tiempotranscurrido-tiempoc)<250))
{
i=2;
}
}
}
if((i==1)&&((tiempotranscurrido-tiempoc)>1000))
{
pasoN++;
if(primer_memoria==true)pasoN=0;
memoria();
digitalWrite(13,HIGH);
delay(100);
digitalWrite(13,LOW);
pasomax=pasoN;
primer_memoria=false;
i=0;
}
else if(i==2)
{
automata=true;
Serial.print("\n****************************************EJECUTAR_AUTOMATA****************************************");
i=0;
}
}
void mover()
{
lectura();
servo1.write(paso[0]);
servo2.write(paso[1]);
servo3.write(paso[2]);
servo4.write(paso[3]);
servo5.write(paso[4]);
}
void ejecutar_automata()
{
if(seccion<=limite)
{
Serial.print("\n\t\t\t\t\t\t\t\tEJECUTANDO_MEMORIA ");Serial.print(pasoN);
Serial.print("\n\t\t\t\t\t\t\t\tSECCION="); Serial.print(seccion);
seccion++;
if(seccion == 1) time = retardo*4;
else if(seccion == 10) time = retardo*3;
else if(seccion == 20) time = retardo*2;
else if(seccion == 30) time = retardo*1;
if(seccion == limite-40) time = retardo*2;
else if(seccion == limite-30) time = retardo*3;
else if(seccion == limite-20) time = retardo*4;
else if(seccion == limite-10) time = retardo*5;
registro[0]+=direccion[0];
registro[1]+=direccion[1];
registro[2]+=direccion[2];
registro[3]+=direccion[3];
registro[4]+=direccion[4];
//habilitar para mover en autómata
servo1.write(registro[0]);
servo2.write(registro[1]);
servo3.write(registro[2]);
servo4.write(registro[3]);
servo5.write(registro[4]);
primer_seccion=false;
}
else
{
limite=0;
sección=0;
pasoN++;
primer_sección=true;
}
while (digitalRead(7)==true)
{
servo1.write(90);
servo2.write(10);//rango inclinado para ganar distancia guardar a 10
servo3.write(150);//rango inclinado para ganar distancia guardar a 150
servo4.write(90);
servo5.write(90);//rango de pinza 90-130
digitalWrite(13, HIGH); delay(500);
digitalWrite(13, LOW); delay(500);
}
}
void matriz_de_traslacion()
{
Serial.print("\n\t\t\t\t\t\t\t\tCALCULO DE MATRIZ");
//calcular diferencias
diferencia[0] = abs (registro[0]-memoria1[pasoN]);
diferencia[1] = abs (registro[1]-memoria2[pasoN]);
diferencia[2] = abs (registro[2]-memoria3[pasoN]);
diferencia[3] = abs (registro[3]-memoria4[pasoN]);
diferencia[4] = abs (registro[4]-memoria5[pasoN]);
//filtrar vibraciones
if(diferencia[0]<=5)diferencia[0]=0;
if(diferencia[1]<=5)diferencia[1]=0;
if(diferencia[2]<=5)diferencia[2]=0;
if(diferencia[3]<=5)diferencia[3]=0;
if(diferencia[4]<=5)diferencia[4]=0;
//calcular limite de secciones
limite = max(diferencia[0],diferencia[1]);
limite = max(limite,diferencia[2]);
limite = max(limite,diferencia[3]);
limite = max(limite,diferencia[4]);
Serial.print("\n\t\t\t\t\t\t\t\tLIMITE=");Serial.print(limite);
//calcula dirección e incremento en grados de cada sección
if(registro[0]>memoria1[pasoN]) direccion[0]=(0-diferencia[0])/limite; else direccion[0]=diferencia[0]/limite;
if(registro[1]>memoria2[pasoN]) direccion[1]=(0-diferencia[1])/limite; else direccion[1]=diferencia[1]/limite;
if(registro[2]>memoria3[pasoN]) direccion[2]=(0-diferencia[2])/limite; else direccion[2]=diferencia[2]/limite;
if(registro[3]>memoria4[pasoN]) direccion[3]=(0-diferencia[3])/limite; else direccion[3]=diferencia[3]/limite;
if(registro[4]>memoria5[pasoN]) direccion[4]=(0-diferencia[4])/limite; else direccion[4]=diferencia[4]/limite;
}
void ultimo_registro()
{
registro[0] = memoria1[pasoN];
registro[1] = memoria2[pasoN];
registro[2] = memoria3[pasoN];
registro[3] = memoria4[pasoN];
registro[4] = memoria5[pasoN];
ultima_memoria=false;
}
void memoria()
{
Serial.print("\n\t\t\t\t\t\tMEMORIA\t\t"); Serial.print(pasoN);
lectura();
memoria1[pasoN] = paso[0];
memoria2[pasoN] = paso[1];
memoria3[pasoN] = paso[2];
memoria4[pasoN] = paso[3];
memoria5[pasoN] = paso[4];
}
void lectura()
{
paso[0]=map(analogRead(A0),157,873,0,180);
paso[1]=map(analogRead(A1),157,873,0,180);
paso[2]=map(analogRead(A2),157,873,0,180);
paso[3]=map(analogRead(A3),157,873,0,180);
if((digitalRead(5))==HIGH)paso[4]=90;else paso[4]=130;
}
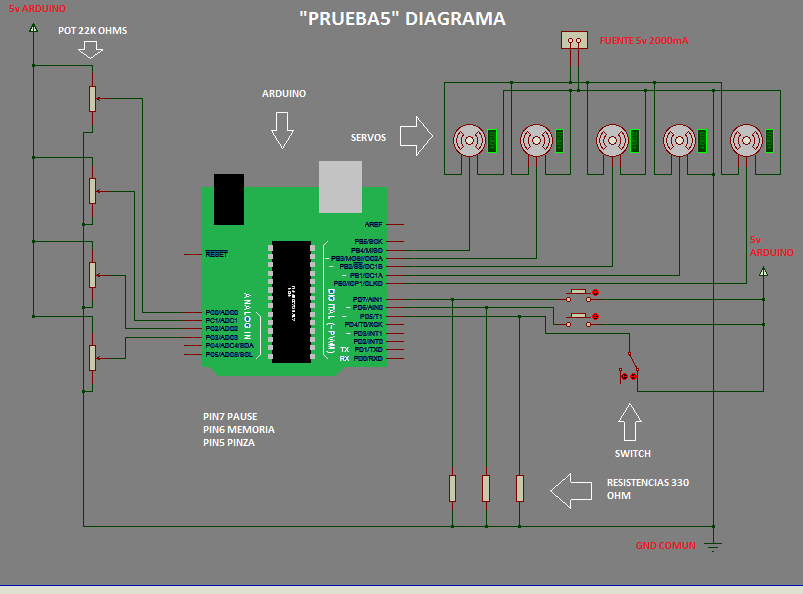
Diagrama de conexión
El nuevo código utiliza una pinza controlada por un switch, un servo adicional y un potencio metro extra. los potencio metros usados en el proyecto son de 20k pero lo ideal es 22k.
Oye con eso codigo es lo mismo usar un arduino uno o un arduino leonardo?
ResponderBorrarsolo cambian las placas, mucha suerte en tu proyecto
Borrarpor favor ino codigo
ResponderBorrarpor favor ino codigo
ResponderBorrarArduino:1.6.12 (Windows 10), Tarjeta:"Arduino/Genuino Uno"
ResponderBorrarC:\Users\LEO\AppData\Local\Temp\arduino_modified_sketch_30842\leo.ino: In function 'void ejecutar_automata()':
leo:163: error: 'else' without a previous 'if'
digitalWrite(13, HIGH); else(500);
^
exit status 1
'else' without a previous 'if'
Este reporte podría tener más información con
"Mostrar salida detallada durante la compilación"
opción habilitada en Archivo -> Preferencias.
no se que pasa
en una parte del codigo esta escrita un else donde debe ir un delay, en la funcion automata. disculpa
BorrarHola Erik,
ResponderBorrarMuchas gracias por compartir el código 5. Lo he utilizado en un brazo robot que me he construido de 5 ejes + pinza y el funcionamiento es muy bueno. Movimientos muy suaves a diferencia del código 3 que eran muy bruscos.
Un saludo